basic_kobuki
Description
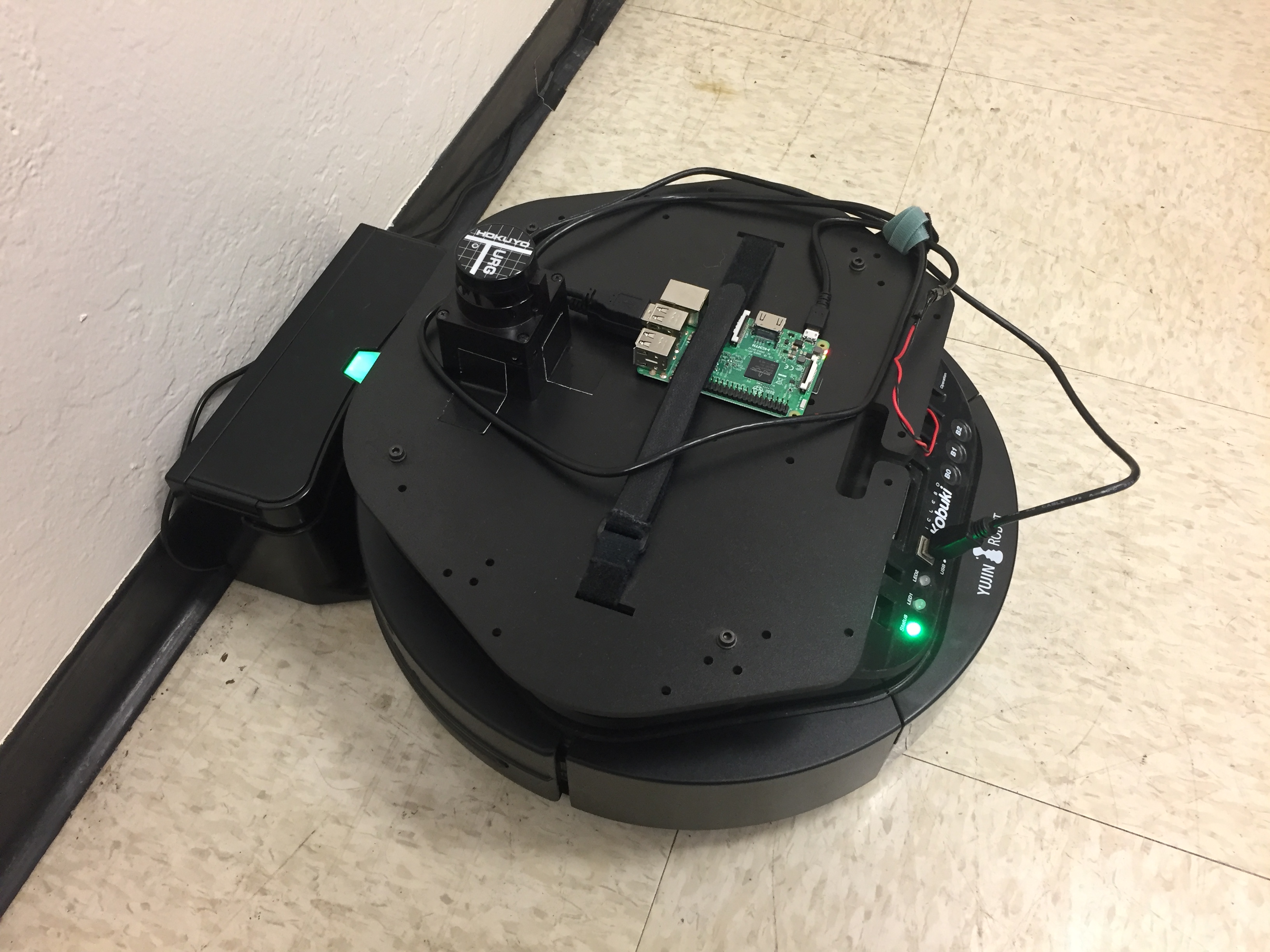
The basic_kobuki workspace type has a freely moving robot that is a simple combination of a Kobuki mobile base, a Raspberry Pi, and laser range finder. It is contained in a space that can be different among deployments of this type; however, in all cases, it is indoors in an office-like environment.
The workspace type has two compute nodes:
- hostname
rrc0: offboard (physically outside the reachable space); x86_64 GNU/Linux box. - hostname
rrc1: mounted onboard the robot; small, low-power ARM board (armv7l).
on rrc0
There are two webcams attached and visible from the device files /dev/video0 and /dev/video1.
on rrc1
The Kobuki mobile platform and Hokuyo laser scanner are both attached via USB. In the default image, the home directory contains the roslaunch file robot.launch. This file starts a ROS Kinetic configuration for using the robot. It uses the ROS packages urg_node and kobuki_node.
Bill of materials
Photographs of a deployment
Changelog
version 1
- initial release
-- Scott C. Livingston <(hidden)> Tue, 28 Aug 2018